Graph Neural Network-Driven Real-Time Scene Understanding for Autonomous Navigation and Smart Surveillance Systems
Keywords:
Graph Neural Networks, Scene Understanding, Autonomous Navigation, Smart Surveillance, Graph Attention Networks, Computer VisionAbstract
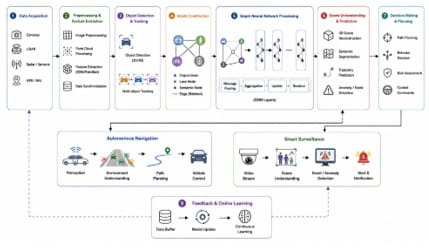
Graph Neural Networks (GNNs) have emerged as powerful deep learning architectures for modeling relational and spatial dependencies in complex visual environments, enabling intelligent scene understanding and adaptive decision-making across autonomous navigation and smart surveillance systems. Modern intelligent transportation systems, autonomous vehicles, unmanned aerial vehicles, robotics platforms, and smart surveillance infrastructures continuously generate massive volumes of high-dimensional visual and sensor data that require real-time contextual interpretation, object interaction analysis, semantic scene reasoning, and adaptive environment understanding. Traditional computer vision techniques and convolutional neural network-based object detection frameworks primarily focus on spatial feature extraction but often struggle to capture dynamic contextual relationships, inter-object dependencies, and graph-structured scene semantics within highly complex and rapidly evolving environments. These limitations reduce the effectiveness of autonomous navigation and intelligent surveillance systems operating in large-scale real-world scenarios involving occlusions, dynamic object interactions, environmental uncertainty, and multi-agent coordination. This research proposes a Graph Neural Network-Driven Real-Time Scene Understanding Framework for Autonomous Navigation and Smart Surveillance Systems designed to improve contextual scene interpretation, intelligent object interaction reasoning, adaptive navigation optimization, and scalable surveillance analytics across heterogeneous intelligent environments. The proposed framework integrates graph neural networks, convolutional visual feature extraction, graph attention mechanisms, reinforcement-driven adaptive optimization, explainable scene analytics, and real-time intelligent decision coordination to support advanced scene understanding and autonomous operational intelligence.